Ou comment revisiter une fable bien connue avec l’œil d’un dynamicien.
(Note : pour une version équivalente mettant en scène Dupond et Dupont en lieu et place des deux animaux héros de cet article, on renvoie à un autre billet de ce blog, Du nombre de rotation ou la mésaventure des Dupondt dans le désert )
Rien ne sert de courir ; il vaut mieux raisonner.
Peuvent l’attester le lapin et l’escargot.
Gageons, dit ce dernier, que jamais vous n’aurez
La victoire à la course. Jamais ? Êtes-vous sot ?
Répartit l’animal léger.
Sot ou non, je parie encore.
Et le lapin de renchérir alors :
Vous ne pourrez me rattraper
Si je commence devant vous.
C’est ce que nous verrons, lui fit l’animal mou.
Ainsi fut fait ; ils décidèrent
Que la course ferait le tour du bois voisin.
Le départ fut donné ; et les deux adversaires,
Décidés à gagner, s’élancèrent enfin.
L’escargot part, s’élance, se hâte avec lenteur ;
Le lapin, refusant de perdre son honneur
Ayant eu vent la veille de la déconvenue
De son aîné le lièvre, fait montre de prudence.
Il ne prend pas de pause, ne réduit sa cadence
Que quand son concurrent est loin et hors de vue,
De sorte que, quand l’escargot déterminé
A terminé son tour,
Le lapin est sur lui aussi bien avancé
Qu’au début du concours.
Mais l’escargot insatisfait
Garda fière figure,
Exigea un second essai,
Relança la gageure.
Or la seconde course fut en tous points semblable ;
Et le gastéropode, bien loin de déchanter,
Continuait tour sur tour, espérant bien gagner,
Mais répétait encor cette course immuable.

Situation 1

Situation 2
Laissons pour l’instant la morale de cette fable en suspens et résumons la situation. Au début de la course (cf. situation 1), le lapin ( ) part un peu en avance sur l’escargot (
) part un peu en avance sur l’escargot ( ), qui doit essayer de le rattraper. La flèche symbolise le sens de la course, et le point
), qui doit essayer de le rattraper. La flèche symbolise le sens de la course, et le point  est le point de départ de l’escargot.
est le point de départ de l’escargot.
A la fin de la course, les positions du lapin et de l’escargot sont les mêmes : le lapin termine de faire un tour complet exactement quand l’escargot fait de même. Nos deux protagonistes enchaînent donc directement sur une nouvelle course, qui se déroule exactement comme la première ; en d’autres termes, le mouvement de et est périodique. Pendant un tour, le lapin prend parfois plus d’avance sur l’escargot, parfois en perd, mais dans tous les cas reste devant ; quant à l’escargot, il avance à vitesse constante.

Situation 3
Intéressons-nous à présent aux états d’âme du gastéropode pendant la course. L’épreuve est exténuante pour lui ; afin de se redonner du baume au cœur, il décide d’adopter la stratégie suivante :
« Il m’est bien difficile de rattraper le lapin. Mais je le vois devant moi ; commençons par rejoindre le point où il se trouve actuellement, et avisons ensuite »
Supposons pour l’instant que l’escargot fait ce raisonnement au début de la course, dans la situation 1. Évidemment, une fois l’objectif atteint, le lapin est encore devant car il a poursuivi sa course dans l’intervalle ; mais l’escargot ne se décourage pas, baptise  le point qu’il a atteint, et décide de renouveler le procédé (situation 2).
le point qu’il a atteint, et décide de renouveler le procédé (situation 2).
Une étape après, on est donc dans la situation 3, où l’escargot a baptisé son nouvelle objectif atteint  . Et l’escargot de continuer sa stratégie au long des courses successives (situation 4).
. Et l’escargot de continuer sa stratégie au long des courses successives (situation 4).

Situation 4
L’escargot rusé a alors l’idée de calculer la moyenne des distances séparant deux objectifs successifs  et
et  . A mesure que les courses se succèdent, il constate que cette sorte de « retard moyen » converge vers une certaine quantité ! Cette limite
. A mesure que les courses se succèdent, il constate que cette sorte de « retard moyen » converge vers une certaine quantité ! Cette limite  est appelée nombre de rotation. Ainsi le mollusque matheux décide-t-il, faute de rattraper le lapin, d’étudier les nombreuses propriétés que semble posséder ce nombre. Prenons à présent un point de vue omniscient, et voyons ce que découvre l’escargot selon les valeurs de .
est appelée nombre de rotation. Ainsi le mollusque matheux décide-t-il, faute de rattraper le lapin, d’étudier les nombreuses propriétés que semble posséder ce nombre. Prenons à présent un point de vue omniscient, et voyons ce que découvre l’escargot selon les valeurs de .
« Légitimité » de
On a supposé dans ce qui précède que l’escargot applique sa stratégie dès le début de la course. Or celui-ci doute soudain : et s’il avait attendu ? aurait-il été différent ? Sans doute cela nuirait à l’intérêt de ce nombre.
Le gastéropode réalise alors que s’il commence sa stratégie au niveau d’un point , son objectifs successifs seront ,  , … : il marquera les mêmes points (excepté , …,
, … : il marquera les mêmes points (excepté , …,  ). Or , comme limite, ne dépend pas des premiers termes, donc est bien inchangé.
). Or , comme limite, ne dépend pas des premiers termes, donc est bien inchangé.
L’escargot envisage ensuite d’avoir commencé sa stratégie non au niveau d’un point , mais entre deux d’entre eux, et . D’après le premier cas envisagé, il peut supposer que ces points sont et . Or au vu des figures 1 et 2, quand il se trouve entre et , le lapin est quant à lui quelque part entre et . Et ainsi de suite : quand l’escargot atteint son premier objectif, entre et , le lapin est entre et  , etc. Cet « encadrement » des objectifs successifs conduit, après quelques calculs simples, au fait que le nouveau retard moyen diffère de l’ancien par une quantité tendant vers 0 : ne dépend donc pas du point en lequel l’escargot entame sa stratégie.
, etc. Cet « encadrement » des objectifs successifs conduit, après quelques calculs simples, au fait que le nouveau retard moyen diffère de l’ancien par une quantité tendant vers 0 : ne dépend donc pas du point en lequel l’escargot entame sa stratégie.
Invariance par changement de terrain
Reprenons notre fable au début et supposons, ceteris paribus, qu’il ait plu peu avant le début de la course ; à cause de cette averse, certaines portions du terrains sont plus ou moins boueuses. Supposons à présent que ces zones boueuses handicapent exactement de la même façon le lapin et l’escargot. Malgré cette hypothèse, un observateur extérieur pourrait croire qu’un tel événement change la donne et modifie le retard moyen de l’escargot sur le lapin. Il n’en est en fait rien : on peut prouver que le nombre de rotation ρ reste inchangé.
Rationalité ou irrationalité
De façon surprenante, la rationalité ou non de influence nettement la façon dont les points sont répartis. Plus précisément :
– Si est rationnel (disons égal à  ,
,  et
et  premiers entre eux), il existe certains points du parcours tels que, si l’escargot commence sa stratégie en ces points (au lieu de la commencer au départ de la course comme précédemment), alors arrive un moment où le gastéropode doit rebaptiser un point. En d’autres termes, il va se fixer comme objectif un point qu’il avait déjà pris pour objectif à un tour précédent : la suite
premiers entre eux), il existe certains points du parcours tels que, si l’escargot commence sa stratégie en ces points (au lieu de la commencer au départ de la course comme précédemment), alors arrive un moment où le gastéropode doit rebaptiser un point. En d’autres termes, il va se fixer comme objectif un point qu’il avait déjà pris pour objectif à un tour précédent : la suite  est périodique. De plus la période vaut :
est périodique. De plus la période vaut :  pour tout
pour tout  , et le nombre de tours que l’escargot a réalisés entre et
, et le nombre de tours que l’escargot a réalisés entre et  est … Ainsi les points sont distribués comme si au long de la course le retard de l’escargot était constant égal à .
est … Ainsi les points sont distribués comme si au long de la course le retard de l’escargot était constant égal à .
– Si est irrationnel, c’est tout le contraire qui se passe : quel que soit le moment où l’escargot amorce sa stratégie, il ne donnera jamais deux noms à un même point. Les points sont même denses dans le cercle ! Cela rappelle un résultat à propos des rotations irrationnelles du cercle, dont traite un autre article de ce blog. Et c’est à juste titre : on peut prouver que, quitte à rendre certaines zones du terrain plus ou moins boueuses à l’aide d’une averse appropriée, alors tout au long de la course le retard de l’escargot sur le lapin restera rigoureusement constant (égal à ).
Il faut noter que cette dernière propriété est fausse dans le cas rationnel : par exemple considérons les deux situations suivantes.
1) Le lapin, craignant de peiner l’escargot, commence la course au même endroit que ce dernier, et reste à sa hauteur jusqu’à la fin du tour. Dans ce cas, le retard de l’escargot est constant égal à 0.
2) Le lapin, parti en tête, est victime d’un violent coup de fatigue ; il avance alors si lentement que l’escargot finit par le rattraper. Dans ce cas, le retard de l’escargot tend vers 0.
Dans les deux cas, le nombre de rotation est donc nul ; cependant, les modifications de terrain affectant de la même façon le lapin et l’escargot, elles ne changent en rien la situation du cas 1). On ne peut donc ramener le cas 2) au cas 1), par quelque averse que ce soit.
Remarque : dans l’exemple précédent, on voit que quand l’escargot rattrape le lapin, le nombre de rotation est nul. C’est en fait même équivalent : si est nul, cela signifie que le retard moyen de l’escargot tend vers 0 ; mais par compacité du cercle, cela entraîne qu’il existe un point ou ce retard est nul, i.e. où l’escargot rattrape le lapin …
Morale de l’histoire :
Si un jour l’on prétend pouvoir vous rattraper
Demandez seulement si est nul ou non ;
Car des deux animaux dans ces pages contés
L’on dit qu’aujourd’hui ils tournent encor en rond.





















![{\log_{10}(a)\in [0,1]}](https://s0.wp.com/latex.php?latex=%7B%5Clog_%7B10%7D%28a%29%5Cin+%5B0%2C1%5D%7D&bg=ffffff&fg=000000&s=0&c=20201002)





![{\{ n\log_{10}(2) \} \in [\log_{10}(a),\log_{10}(a+1)]}](https://s0.wp.com/latex.php?latex=%7B%5C%7B+n%5Clog_%7B10%7D%282%29+%5C%7D+%5Cin+%5B%5Clog_%7B10%7D%28a%29%2C%5Clog_%7B10%7D%28a%2B1%29%5D%7D&bg=ffffff&fg=000000&s=0&c=20201002)


![\displaystyle F_a = \lim_{n\rightarrow \infty} \frac{1}{n} \# \{ k\in [1,n], Prem(2^k) = a \}](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+F_a+%3D+%5Clim_%7Bn%5Crightarrow+%5Cinfty%7D+%5Cfrac%7B1%7D%7Bn%7D+%5C%23+%5C%7B+k%5Cin+%5B1%2Cn%5D%2C+Prem%282%5Ek%29+%3D+a+%5C%7D+&bg=ffffff&fg=000000&s=0&c=20201002)
![\displaystyle F_a = \lim_{n\rightarrow \infty} \frac{1}{n} \sum_{k=1}^{n} \mathbf{1}_{[\log_{10}(a),\log_{10}(a+1)]}(\{ k\log_{10}(2) \}).](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+F_a+%3D+%5Clim_%7Bn%5Crightarrow+%5Cinfty%7D+%5Cfrac%7B1%7D%7Bn%7D+%5Csum_%7Bk%3D1%7D%5E%7Bn%7D+%5Cmathbf%7B1%7D_%7B%5B%5Clog_%7B10%7D%28a%29%2C%5Clog_%7B10%7D%28a%2B1%29%5D%7D%28%5C%7B+k%5Clog_%7B10%7D%282%29+%5C%7D%29.+&bg=ffffff&fg=000000&s=0&c=20201002)














![{\mathbf{1}_{[\log_{10}(a),\log_{10}(a+1)]}}](https://s0.wp.com/latex.php?latex=%7B%5Cmathbf%7B1%7D_%7B%5B%5Clog_%7B10%7D%28a%29%2C%5Clog_%7B10%7D%28a%2B1%29%5D%7D%7D&bg=ffffff&fg=000000&s=0&c=20201002)











![{\alpha \in [0,1]}](https://s0.wp.com/latex.php?latex=%7B%5Calpha+%5Cin+%5B0%2C1%5D%7D&bg=ffffff&fg=000000&s=0&c=20201002)









![{\beta \in [0,1]}](https://s0.wp.com/latex.php?latex=%7B%5Cbeta+%5Cin+%5B0%2C1%5D%7D&bg=ffffff&fg=000000&s=0&c=20201002)






![\displaystyle F_a = \lim_{n\rightarrow \infty} \frac{1}{n} \sum_{k=1}^{n} \mathbf{1}_{[\log_{10}(a),\log_{10}(a+1)]}(T_{\log_{10}(2)}^k(0)).](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+F_a+%3D+%5Clim_%7Bn%5Crightarrow+%5Cinfty%7D+%5Cfrac%7B1%7D%7Bn%7D+%5Csum_%7Bk%3D1%7D%5E%7Bn%7D+%5Cmathbf%7B1%7D_%7B%5B%5Clog_%7B10%7D%28a%29%2C%5Clog_%7B10%7D%28a%2B1%29%5D%7D%28T_%7B%5Clog_%7B10%7D%282%29%7D%5Ek%280%29%29.+&bg=ffffff&fg=000000&s=0&c=20201002)
![\displaystyle F_a = \int_{\mathbb{T}} \mathbf{1}_{[\log_{10}(a),\log_{10}(a+1)]} d\mu = \log_{10}(1+\frac{1}{a})](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+F_a+%3D+%5Cint_%7B%5Cmathbb%7BT%7D%7D+%5Cmathbf%7B1%7D_%7B%5B%5Clog_%7B10%7D%28a%29%2C%5Clog_%7B10%7D%28a%2B1%29%5D%7D+d%5Cmu+%3D+%5Clog_%7B10%7D%281%2B%5Cfrac%7B1%7D%7Ba%7D%29+&bg=ffffff&fg=000000&s=0&c=20201002)



 d’entiers qu’est qu’on peut dire sur l’existence d’une progression arithmétique arbitrairement longue contenue dans
d’entiers qu’est qu’on peut dire sur l’existence d’une progression arithmétique arbitrairement longue contenue dans  existent-t-ils des entiers
existent-t-ils des entiers  tels que
tels que  ?
? forment une partition de
forment une partition de  , alors l’un des ensembles
, alors l’un des ensembles 
 ) avec le
) avec le alors
alors  alors
alors  un système dynamique mesuré avec
un système dynamique mesuré avec  , et
, et  une partie de mesure strictement positive. Alors il existe
une partie de mesure strictement positive. Alors il existe  tel que
tel que
 une partie de densité supérieure strictement positive, c’est-à-dire telle que
une partie de densité supérieure strictement positive, c’est-à-dire telle que 
 il existe
il existe  et un entier
et un entier  tel que
tel que 
 qui vérifie les hypothèses de Szemeredi. Soit
qui vérifie les hypothèses de Szemeredi. Soit  l’application de traslation définie par
l’application de traslation définie par  (où
(où  est l’ensemble des parties de
est l’ensemble des parties de  . On peut alors considérer l’ensemble
. On peut alors considérer l’ensemble  des parties
des parties  de
de  existe
existe  tel que
tel que 
 définie par
définie par
 (donc
(donc  ).
). est l’adhérence de l’orbite de
est l’adhérence de l’orbite de  pour le décalage
pour le décalage  . On commence en observant que
. On commence en observant que  est une semiconjugaison entre
est une semiconjugaison entre  . En effet on a que si
. En effet on a que si  alors
alors ( où
( où  ) avec
) avec
 où
où
 . On peut alors écrire que
. On peut alors écrire que


 par le décalage
par le décalage  la mesure borélienne
la mesure borélienne  sur
sur  définie par
définie par
 et
et  désigne la masse de Dirac au point
désigne la masse de Dirac au point  . On appelle
. On appelle  vérifiant
vérifiant  .
.

 , on a que par compacité de
, on a que par compacité de  (car il est un fermé dans un compacte), cette suite doit admettre une sous-suite convergente vers un élément qu’on notera
(car il est un fermé dans un compacte), cette suite doit admettre une sous-suite convergente vers un élément qu’on notera  . Cette mesure
. Cette mesure  est une mesure de probabilité par construction.
est une mesure de probabilité par construction. . Soit
. Soit  la sous-suite extraite. On a alors que:
la sous-suite extraite. On a alors que:


 . Nous avons comme hypothèse que
. Nous avons comme hypothèse que
 . On en deduit que aussi
. On en deduit que aussi  , donc on a forcement que
, donc on a forcement que 
 ) est de probabilité sur
) est de probabilité sur  . La thèse est alors qu’il existe un
. La thèse est alors qu’il existe un  , mais cette affirmation est exactement équivalente à la thèse du Théorème de Szemeredi, grâce à la définition de
, mais cette affirmation est exactement équivalente à la thèse du Théorème de Szemeredi, grâce à la définition de  : en effet l’ensemble
: en effet l’ensemble  est composé par les suites avec les composants
est composé par les suites avec les composants  , et on a que la mesure de cet ensemble est strictement positive. On se rappelle alors de la définition donnée pour la mesure
, et on a que la mesure de cet ensemble est strictement positive. On se rappelle alors de la définition donnée pour la mesure  ). En étant
). En étant  positive il faut que dans
positive il faut que dans 
 et
et  est une variable complexe. Nous allons étudier le comportement des orbites de cette famille, en particulier des orbites positives, qui sont définies de la façon suivante
est une variable complexe. Nous allons étudier le comportement des orbites de cette famille, en particulier des orbites positives, qui sont définies de la façon suivante
 est suffisamment générale, car tout polynôme quadratique est conjugué à un unique polynôme
est suffisamment générale, car tout polynôme quadratique est conjugué à un unique polynôme  par une application
par une application  avec
avec  appropriés. Donc, ce n’est pas restrictif de considérer seulement la famille à un paramétre
appropriés. Donc, ce n’est pas restrictif de considérer seulement la famille à un paramétre  et on pourra penser au pôle nord
et on pourra penser au pôle nord  , qui est aussi appelé sphère de Riemann, et l’action de
, qui est aussi appelé sphère de Riemann, et l’action de  sera transformée dans une nouvelle action
sera transformée dans une nouvelle action  sur
sur  et
et  , alors
, alors  sûrement et
sûrement et
 est la projection canonique. Afin d’étudier le comportement de
est la projection canonique. Afin d’étudier le comportement de  , il faut introduire l’application
, il faut introduire l’application  , qui change
, qui change  et
et 
 . Un calcul très facile nous donne que
. Un calcul très facile nous donne que
 et
et  , alors
, alors  si et seulement si
si et seulement si  et
et  , mais au-delà de la définition on peut noter que l’attractivité est une notion très intuitive. En effet, l’attractivité de
, mais au-delà de la définition on peut noter que l’attractivité est une notion très intuitive. En effet, l’attractivité de 
 depend du choix de
depend du choix de  . De plus, on remarque que cet ensemble ne peut jamais être égal à
. De plus, on remarque que cet ensemble ne peut jamais être égal à  . Donc la frontière
. Donc la frontière  est non vide et elle est appelée l’ensemble de Julia de
est non vide et elle est appelée l’ensemble de Julia de  . On remarque que cet ensemble sépare les points, dont les orbites s’approchent de
. On remarque que cet ensemble sépare les points, dont les orbites s’approchent de  un point périodique pour
un point périodique pour  et on pose
et on pose
 , en généralisant la définition précédente de point fixe attractif, et qu’elle est répulsive si
, en généralisant la définition précédente de point fixe attractif, et qu’elle est répulsive si  . En outre, après
. En outre, après 
 on a
on a  , c’est à dire le cercle de rayon
, c’est à dire le cercle de rayon  , alors que si
, alors que si  ,
, ![J_c = \{ z \,:\, \Re(z) \in [-2,2],\,\Im(z)=0 \}](https://s0.wp.com/latex.php?latex=J_c+%3D+%5C%7B+z+%5C%2C%3A%5C%2C+%5CRe%28z%29+%5Cin+%5B-2%2C2%5D%2C%5C%2C%5CIm%28z%29%3D0+%5C%7D&bg=ffffff&fg=545454&s=0&c=20201002) , i.e. un intervalle. Mais vous pouvez aussi observer les dessins suivants, qui sont beaucoup plus compliqués et montrent des ensembles de Julia remplis: ce sont de vrais fractals! Et on remarque qu’ils sont tous obtenus de la même famille de systémes dynamiques
, i.e. un intervalle. Mais vous pouvez aussi observer les dessins suivants, qui sont beaucoup plus compliqués et montrent des ensembles de Julia remplis: ce sont de vrais fractals! Et on remarque qu’ils sont tous obtenus de la même famille de systémes dynamiques 


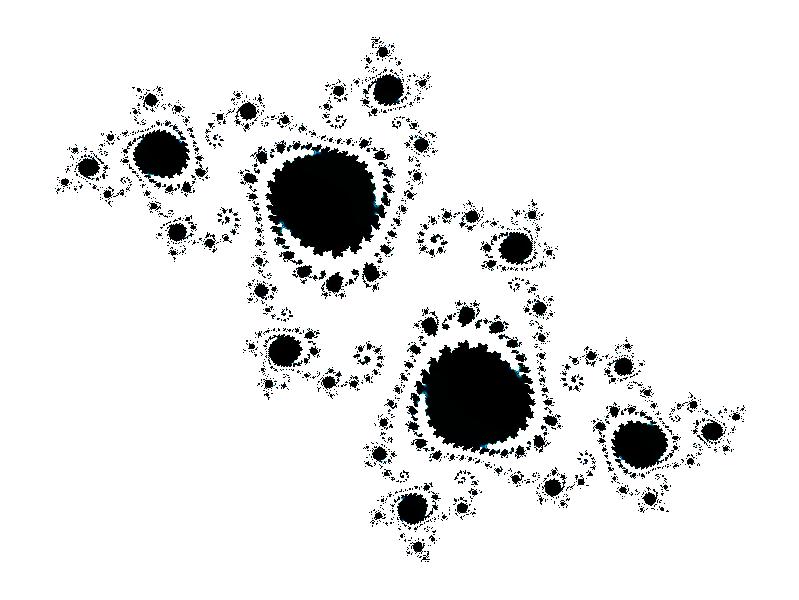




 est connexe ou, sinon, un ensemble de Cantor, c’est à dire un ensemble totalement discontinu et sans point isolé. En effet, il y a un résultat plus général, dû à Fatou et Julia, qui est le suivant: soit
est connexe ou, sinon, un ensemble de Cantor, c’est à dire un ensemble totalement discontinu et sans point isolé. En effet, il y a un résultat plus général, dû à Fatou et Julia, qui est le suivant: soit  l’ensemble des points critiques d’un polynôme
l’ensemble des points critiques d’un polynôme  ; alors:
; alors:

 est connexe;
est connexe;

 est dit critique pour une application différentiable
est dit critique pour une application différentiable  si
si  ; l’image de
; l’image de  , est dite valeur critique. Dans la situation précédente,
, est dite valeur critique. Dans la situation précédente, 

 ; et qu’est-ce qu’on peut dire de lui? Le fait le plus important est le comportement de
; et qu’est-ce qu’on peut dire de lui? Le fait le plus important est le comportement de  et
et  de
de  tel que
tel que  ) et les points périodiques sont denses en
) et les points périodiques sont denses en  , c’est à dire l’unique point critique de tout polynôme quadratique
, c’est à dire l’unique point critique de tout polynôme quadratique  .
. pour tout
pour tout  , alors colorez
, alors colorez  . »
. » de densité supérieure strictement positive, c’est à dire telle que
de densité supérieure strictement positive, c’est à dire telle que
 il existe un entier
il existe un entier  et un entier
et un entier  tel que
tel que  contienne tous les entiers
contienne tous les entiers .
. ,
, ) un espace mesuré et
) un espace mesuré et  . On dit que
. On dit que 
 ,
, l’ensemble des points de
l’ensemble des points de 
 X une partie de mesure strictement positive. Alors il existe
X une partie de mesure strictement positive. Alors il existe 
 ,
,  est de mesure positive.
est de mesure positive. où
où  .
. du décalage
du décalage 


 on peut reformuler l’hypothèse du théorème de Szemerédi
on peut reformuler l’hypothèse du théorème de Szemerédi
 des mesures de probabilité sur X est compact donc, la limite supérieure des mesures
des mesures de probabilité sur X est compact donc, la limite supérieure des mesures


 ,
, tel que:
tel que:  .
. , le résultat du théorème de Furstenberg se réecrit
, le résultat du théorème de Furstenberg se réecrit .
. ,
,  tel que
tel que  .
.

 sont tous dans
sont tous dans  des homéomorphismes du cercle préservant l’orientation, canoniquement muni d’une structure de groupe topologique complet par la distance
des homéomorphismes du cercle préservant l’orientation, canoniquement muni d’une structure de groupe topologique complet par la distance ,
, désigne la norme infinie, définie par
désigne la norme infinie, définie par  .
. , typiquement quelles relations peut-on attendre entre
, typiquement quelles relations peut-on attendre entre  et
et  ? Bien sûr, ce n’est pas une question formelle, aussi la réponse dépendra-t-elle du point de vue que l’on adoptera.
? Bien sûr, ce n’est pas une question formelle, aussi la réponse dépendra-t-elle du point de vue que l’on adoptera. engendrant un sous-groupe libre de rang deux de
engendrant un sous-groupe libre de rang deux de  dense dans
dense dans  .
. , est la suivante :
, est la suivante : , et considérons l’ensemble
, et considérons l’ensemble  ; on dira qu’un tel mot est réduit s’il ne contient pas de sous-mot de la forme
; on dira qu’un tel mot est réduit s’il ne contient pas de sous-mot de la forme  ,
,  ,
,  ou
ou  . L’ensemble des mots réduits de
. L’ensemble des mots réduits de  et
et  sont deux mots réduits de
sont deux mots réduits de  comme le mot composé de
comme le mot composé de  ,
, si
si  et
et  , et
, et  si
si  , sont différents de l’identité.
, sont différents de l’identité. , l’on note
, l’on note  l’ensemble des triplets
l’ensemble des triplets  vérifiant
vérifiant  , et que l’on montre que chaque
, et que l’on montre que chaque  est un fermé d’intérieur non vide. En effet, si
est un fermé d’intérieur non vide. En effet, si  , alors
, alors  . Donc il existe
. Donc il existe  ,
,  et
et  arbitrairements proches de
arbitrairements proches de  ie.
ie.  , et en particulier
, et en particulier  . Dès lors, d’après le théorème de Baire, l’ensemble
. Dès lors, d’après le théorème de Baire, l’ensemble
 de longueur
de longueur  . Pour tous mots
. Pour tous mots  , notons
, notons
 par l’homéomorphisme
par l’homéomorphisme  ; en particulier,
; en particulier,  est un fermé d’intérieur vide si
est un fermé d’intérieur vide si  .
. est lui-même un fermé d’intérieur vide, nous pouvons nous donner un triplet
est lui-même un fermé d’intérieur vide, nous pouvons nous donner un triplet  qui n’appartienne à aucun
qui n’appartienne à aucun  où
où  (
( ) puis
) puis .
. puisque
puisque  dès que
dès que  . En effet, si ce n’était pas le cas, il existerait un sous-mot
. En effet, si ce n’était pas le cas, il existerait un sous-mot  de
de  de longueur strictement inférieure fixant un
de longueur strictement inférieure fixant un  , lui-même de la forme
, lui-même de la forme  ; on aurait alors
; on aurait alors  , ce que nous avons exclu par hypothèse.
, ce que nous avons exclu par hypothèse. et
et  approchant
approchant  mais
mais  . Dès lors,
. Dès lors,  par approximation mais
par approximation mais  par construction, une contradiction.
par construction, une contradiction. 
 ), condition indispensable pour la bonne définition des approximations
), condition indispensable pour la bonne définition des approximations  contient de nombreux sous-groupes libres, mais en connaît-on un ? A-t-on un exemple explicite d’une paire d’homéomorphismes engendrant un groupe libre de rang deux ?
contient de nombreux sous-groupes libres, mais en connaît-on un ? A-t-on un exemple explicite d’une paire d’homéomorphismes engendrant un groupe libre de rang deux ? est homéomorphe à la droite projective réelle
est homéomorphe à la droite projective réelle  , qui s’identifie à l’ensemble des droites vectorielles du plan. Dès lors, on peut faire agir naturellement le groupe des matrices inversibles, que l’on connaît bien, sur le cercle, puis mettre en évidence un sous-groupe libre en choisissant soigneusement une paire de matrices et étudier leur action sur le cercle. C’est ce qui a été fait dans le billet précédent
, qui s’identifie à l’ensemble des droites vectorielles du plan. Dès lors, on peut faire agir naturellement le groupe des matrices inversibles, que l’on connaît bien, sur le cercle, puis mettre en évidence un sous-groupe libre en choisissant soigneusement une paire de matrices et étudier leur action sur le cercle. C’est ce qui a été fait dans le billet précédent  , et introduire le groupe des homéomorphismes linéaires par morceaux (préservant l’orientation) :
, et introduire le groupe des homéomorphismes linéaires par morceaux (préservant l’orientation) : un homéomorphisme. S’il existe une suite
un homéomorphisme. S’il existe une suite  de réels vérifiant
de réels vérifiant  , et telle que
, et telle que ![[x_i,x_{i+1}]](https://s0.wp.com/latex.php?latex=%5Bx_i%2Cx_%7Bi%2B1%7D%5D&bg=ffffff&fg=545454&s=0&c=20201002) , on dit que
, on dit que  pour tout
pour tout  , alors
, alors  .
.


 ,
,![f^n \left( \left] \frac{1}{3}, \frac{2}{3} \right[ \right) \subset \left] 0,\frac{1}{3} \right[ \cup \left] \frac{2}{3},1 \right[](https://s0.wp.com/latex.php?latex=f%5En+%5Cleft%28+%5Cleft%5D+%5Cfrac%7B1%7D%7B3%7D%2C+%5Cfrac%7B2%7D%7B3%7D+%5Cright%5B+%5Cright%29+%5Csubset+%5Cleft%5D+0%2C%5Cfrac%7B1%7D%7B3%7D+%5Cright%5B+%5Ccup+%5Cleft%5D+%5Cfrac%7B2%7D%7B3%7D%2C1+%5Cright%5B&bg=ffffff&fg=545454&s=0&c=20201002) et
et ![g^n \left( \left] 0,\frac{1}{3} \right[ \cup \left] \frac{2}{3},1 \right[ \right) \subset \left] \frac{1}{3}, \frac{2}{3} \right[](https://s0.wp.com/latex.php?latex=g%5En+%5Cleft%28+%5Cleft%5D+0%2C%5Cfrac%7B1%7D%7B3%7D+%5Cright%5B+%5Ccup+%5Cleft%5D+%5Cfrac%7B2%7D%7B3%7D%2C1+%5Cright%5B+%5Cright%29+%5Csubset+%5Cleft%5D+%5Cfrac%7B1%7D%7B3%7D%2C+%5Cfrac%7B2%7D%7B3%7D+%5Cright%5B&bg=ffffff&fg=545454&s=0&c=20201002) .
. et
et  engendrent un sous-groupe libre de rang deux de
engendrent un sous-groupe libre de rang deux de  un groupe agissant sur un ensemble
un groupe agissant sur un ensemble  . Supposons qu’il existe
. Supposons qu’il existe  et
et  vérifiant :
vérifiant : sont non vides et disjoints,
sont non vides et disjoints, et
et  pour tout
pour tout  .
. engendre un groupe libre de rang deux.
engendre un groupe libre de rang deux.
 est périodique ; tandis que l’orbite de ce point par une rotation d’angle incommensurable à
est périodique ; tandis que l’orbite de ce point par une rotation d’angle incommensurable à  .
. , il appelle
, il appelle  le i-ème point passage, puis
le i-ème point passage, puis  la longueur de l’arc (
la longueur de l’arc ( ). Poincaré démontre alors que le rapport
). Poincaré démontre alors que le rapport ,
,
 préservant l’orientation (on notera
préservant l’orientation (on notera  ) est la suivante : considérant un relevé F de f sur
) est la suivante : considérant un relevé F de f sur  (c’est-à-dire tel que
(c’est-à-dire tel que  où
où  ) et x dans
) et x dans  , est défini par :
, est défini par :

 ,
,  définie sur
définie sur  a pour nombre de rotation
a pour nombre de rotation  .
.  , c’est-à-dire qu’il existe une surjection h de
, c’est-à-dire qu’il existe une surjection h de  ; ce résultat est encore dû à Poincaré. Cependant, f n’est pas conjugué à
; ce résultat est encore dû à Poincaré. Cependant, f n’est pas conjugué à  ayant pour nombre de rotation
ayant pour nombre de rotation  définis sur
définis sur 
![[0,1]](https://s0.wp.com/latex.php?latex=%5B0%2C1%5D&bg=ffffff&fg=545454&s=0&c=20201002) . N
. N .
. pour tout rationnel p/q. Mais lorsque
pour tout rationnel p/q. Mais lorsque  devient un intervalle non trivial !
devient un intervalle non trivial ! admet un point fixe, et donc
admet un point fixe, et donc  . L’autre extrémité de
. L’autre extrémité de  est atteinte en situation de stabilité marginale, c’est-à-dire que pour un point fixe
est atteinte en situation de stabilité marginale, c’est-à-dire que pour un point fixe  . On en déduit que
. On en déduit que  .
.
 , croissante et valant 0 en 0 et 1 en 1, est localement constante en toute valeur rationnelle : son graphe est un escalier du diable.
, croissante et valant 0 en 0 et 1 en 1, est localement constante en toute valeur rationnelle : son graphe est un escalier du diable.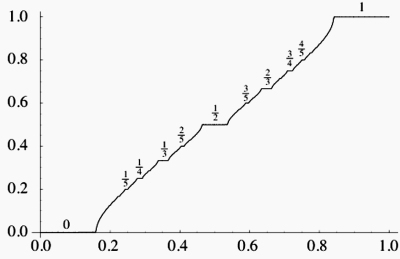
 .
. , l’ensemble
, l’ensemble  est un empilement d’intervalles éclosant du singleton
est un empilement d’intervalles éclosant du singleton  , dont la forme rappelle une langue, appelée langue d’Arnol’d de p/q, du nom du découvreur en 1961 de ce phénomène, Vladimir Igorevitch Arnol’d (1937-2010).
, dont la forme rappelle une langue, appelée langue d’Arnol’d de p/q, du nom du découvreur en 1961 de ce phénomène, Vladimir Igorevitch Arnol’d (1937-2010).
 est de mesure 1 pour tout
est de mesure 1 pour tout  , les langues d’Arnol’d se chevauchent :
, les langues d’Arnol’d se chevauchent : 

 et on pose
et on pose  . La question fondamentale est : Est-ce qu’il existe un changement holomorphe de variables
. La question fondamentale est : Est-ce qu’il existe un changement holomorphe de variables  avec
avec  tel que
tel que  au voisinage du point fixe
au voisinage du point fixe  . Si une telle conjugaison existe on dit que
. Si une telle conjugaison existe on dit que  est transportée par
est transportée par  en une propriété de
en une propriété de  où
où  et
et  sont les k-èmes itérées de
sont les k-èmes itérées de  respectivement.
respectivement. . Ici, on s’occupera seulement d’un certain cas qui à l’époque était difficile à traiter. On considère le cas où
. Ici, on s’occupera seulement d’un certain cas qui à l’époque était difficile à traiter. On considère le cas où  et
et  où
où  est un nombre réel et irrationnel.
est un nombre réel et irrationnel. irrationnel satisfait la condition de Cremer (de degré d) si le nombre
irrationnel satisfait la condition de Cremer (de degré d) si le nombre 
 .
. , alors tout voisinage de
, alors tout voisinage de  qui satisfont la condition de Cremer n’est pas vide, ce qui n’est pas évident. En fait, il suffit de remarquer que cet ensemble contient une intersection dénombrable d’ouverts denses:
qui satisfont la condition de Cremer n’est pas vide, ce qui n’est pas évident. En fait, il suffit de remarquer que cet ensemble contient une intersection dénombrable d’ouverts denses:  . Donc, par le théorème de Baire, l’ensemble est dense.
. Donc, par le théorème de Baire, l’ensemble est dense. et on pose
et on pose  . La fonction
. La fonction  . Par abus de notation, on notera
. Par abus de notation, on notera  . Evidemment
. Evidemment  . Ensuite,on s’intéresse aux points fixes de la k-ème itérée de
. Ensuite,on s’intéresse aux points fixes de la k-ème itérée de  ,
,  . N’oublions pas qu’en étudiant les points fixes de
. N’oublions pas qu’en étudiant les points fixes de  on étudie les points périodiques de
on étudie les points périodiques de  . A part la racine en zéro, le produit des autres
. A part la racine en zéro, le produit des autres  racines est égal à
racines est égal à  et donc on peut avoir facilement une majoration. Plus précisément, on peut dire que au moins un des points fixes non nuls, appelons-le
et donc on peut avoir facilement une majoration. Plus précisément, on peut dire que au moins un des points fixes non nuls, appelons-le  , sera majoré :
, sera majoré :  . Ensuite, en utilisant la condition de Cremer on a que
. Ensuite, en utilisant la condition de Cremer on a que  pour
pour  . Puis par le théorème de Taylor, on écrit
. Puis par le théorème de Taylor, on écrit  au voisinage de l’origine et on peut choisir
au voisinage de l’origine et on peut choisir  très petit tel que
très petit tel que  quand
quand  . En conséquence, la k-ème itérée est aussi majorée:
. En conséquence, la k-ème itérée est aussi majorée:  quand
quand  . En fait, pour k arbitrairement grand, on a
. En fait, pour k arbitrairement grand, on a  . Alors, pour la fonction
. Alors, pour la fonction  où
où  de degré au plus d-1 et
de degré au plus d-1 et  . Ensuite, on remarque que les points fixes de la k-ème itérée de
. Ensuite, on remarque que les points fixes de la k-ème itérée de  . D’après les calculs déjà faits à la 2ème étape on démontre le théorème.
. D’après les calculs déjà faits à la 2ème étape on démontre le théorème. et
et  telles que
telles que  , alors
, alors  que l’on voudrait étudier: il s’agit d’un système dynamique. Une façon de l’étudier est de regarder le comportement des orbites des points: étant donné
que l’on voudrait étudier: il s’agit d’un système dynamique. Une façon de l’étudier est de regarder le comportement des orbites des points: étant donné  , on se pose des questions sur l’ensemble des
, on se pose des questions sur l’ensemble des  pour
pour  sont conjuguées par
sont conjuguées par  (c’est-à-dire
(c’est-à-dire  ) alors
) alors  ) seront envoyés sur les itérés de
) seront envoyés sur les itérés de  , à savoir les
, à savoir les  .
. . Notons
. Notons  la translation de vecteur
la translation de vecteur  la rotation de centre
la rotation de centre  la symétrie par rapport à la droite
la symétrie par rapport à la droite  .
.


 . On peut répondre de tête, à condition de savoir calculer vite ou de considérer ce que nous avions remarqué sur les orbites. L’orbite du point 0 pour
. On peut répondre de tête, à condition de savoir calculer vite ou de considérer ce que nous avions remarqué sur les orbites. L’orbite du point 0 pour  est l’ensemble des
est l’ensemble des  avec
avec  , on obtient que l’orbite du point 0 pour
, on obtient que l’orbite du point 0 pour  avec
avec  i.e. de
i.e. de  .
.
 ? Les points de
? Les points de  sont fixes pour
sont fixes pour 
 pour un
pour un  si
si  pour un
pour un ![\alpha \in [0,2 \pi]](https://s0.wp.com/latex.php?latex=%5Calpha+%5Cin+%5B0%2C2+%5Cpi%5D&bg=ffffff&fg=545454&s=0&c=20201002) si
si  si
si 